Important Dates
Paper Submission Deadline: 11 July
Notification of Acceptance: 1 Aug
Camera Ready: 8 Aug
Extended Abstract Submission Deadline: 8 Aug
Challenge Submission Deadline: 5 Sep
Workshop Date: 8, 9 or 16 Oct
Venue
R6D Workshop is part of the ECCV 2016 workshops.
Please see the ECCV webpage for details on venue, accomodations etc.
News
Our website is online
Participate
Papers / Extended Abstracts Submissions
Extended abstracts are limited to two pages. Authors are free to use any format available, e.g. the ECCV 2016 word or LaTex templates tar or zip.
All submissions will be handled electronically via the conference’s CMT Website.
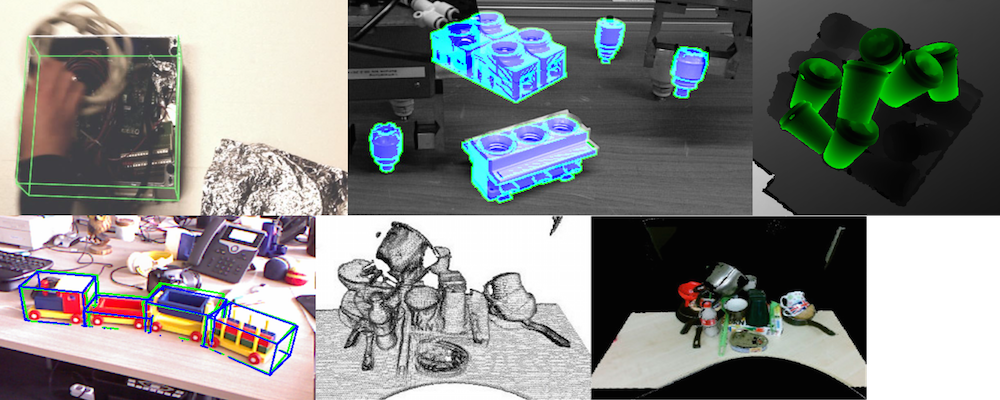
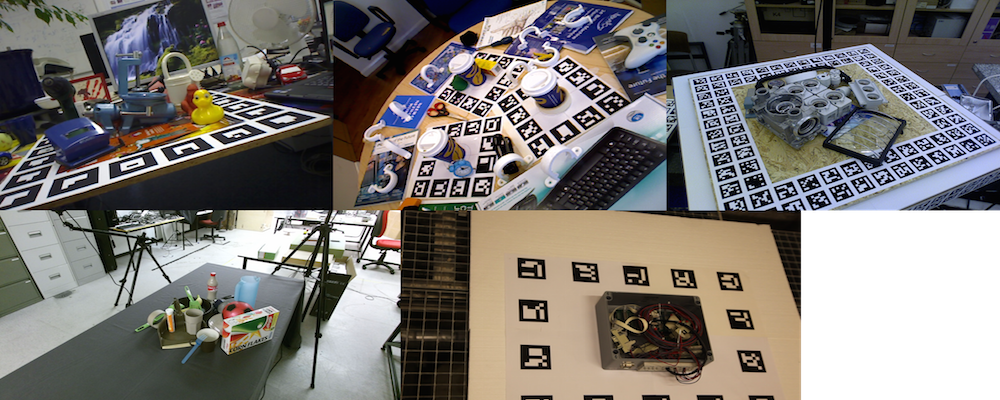
Challenges
Imperial College London TU Dresden TU Graz & EPFL Czech Tech. University University of Birmingham
Keynote Speakers
-
Tinne Tuytelaars, KU Leuven
Carsten Steger, MVTec GmbH
Silvio Savarese, Stanford
Jianxiong Xiao, Princeton
Zoltan Marton, DLR, Open Perception
Carsten Rother, TU Dresden
-

-

-
-

-
-
Workshop Chairs
Tae-Kyun Kim, Imperial College London
Jiri Matas, Chech Technical University
Vincent Lepetit, Technical University Graz
Carsten Rother, Technical University Dresden
Ales Leonardis, University of Birmingham
Krzysztof Wallas, Poznan University of Technology
Carsten Steger, MVTec GmbH
Rigas Kouskouridas, Imperial College London
Challenge Chairs
Frank Michel, Technical University Dresden
Alexander Krull, Technical University Dresden
Andreas Doumanoglou, Imperial College London
Tomas Hodan, Chech Technical University
Alberto Crivellaro, EPFL
Technical Program Committee
Antonis Argyros, FORTH
Ujwal Bonde, Toshiba Research
Bertram Drost, MVTec GmbH
Hironobu Fujiyoshi, Chubu University
Stefan Hinterstoisser, Google
Edward Johns, Imperial College London
Yoshinori Konishi, Omron
Victor Lempitsky, Skoltech
Joseph J. Lim, Stanford
Justus Piater, University of Innsbruck
Colin Rennie, Rutgers University
Ulrike Thomas, Technical University of Chemnitz